Loading...
Searching...
No Matches
Classes |
Public Types |
Public Member Functions |
Static Public Member Functions |
Private Attributes |
List of all members
nngn::Math Class Reference
#include <math.h>
Classes | |
| struct | rnd_generator_t |
Public Types | |
| using | rand_seed_t = std::decay_t< > |
Public Member Functions | |
| auto * | rnd_generator (void) |
| void | init (void) |
| void | seed_rand (rand_seed_t s) |
| void | rand_mat (std::span< float > m) |
Static Public Member Functions | |
| template<typename T = double> | |
| static constexpr T | sq2_2 (void) |
| template<typename T = double> | |
| static constexpr T | sq2 (void) |
| template<typename T = double> | |
| static constexpr T | e (void) |
| template<typename T = double> | |
| static constexpr T | pi (void) |
| template<typename T = double> | |
| static constexpr T | tau (void) |
| template<typename T = double> | |
| static constexpr T | radians (T d) |
| template<typename T = double> | |
| static constexpr T | degrees (T r) |
| template<typename T > | |
| static constexpr T | round_down_pow2 (T n, T d) |
| template<typename T > | |
| static constexpr T | round_up_pow2 (T n, T d) |
| template<typename T > | |
| static constexpr T | round_down (T n, T d) |
| template<typename T > | |
| static constexpr T | round_up (T n, T d) |
| template<typename T > | |
| static constexpr T | round_up_div (T n, T d) |
| template<unsigned_integral T> | |
| static constexpr T | mip_levels (T extent) |
| template<typename T > | |
| static constexpr auto | dot (T u, T v) |
| template<typename T > | |
| static constexpr auto | length2 (T v) |
| template<typename T > | |
| static auto | length (T v) |
| template<typename T > | |
| static T | normalize (T v) |
| template<template< typename > typename V, typename T > requires vector<V, T> | |
| static V< T > | clamp_len (V< T > v, T len) |
| template<typename T > | |
| static constexpr vector_type< T > | sum (T v) |
| template<typename T > | |
| static constexpr vector_type< T > | product (T v) |
| template<typename T > | |
| static constexpr vector_type< T > | avg (T v) |
| template<typename T > | |
| static constexpr vec3_base< T > | cross (vec3_base< T > u, vec3_base< T > v) |
| template<typename T > | |
| static constexpr T | angle (vec2_base< T > u, vec2_base< T > v) |
| template<typename T > | |
| static constexpr T | angle (vec3_base< T > u, vec3_base< T > v, vec3_base< T > n) |
| template<typename T > | |
| static constexpr vec3_base< T > | reflect (vec3_base< T > v, vec3_base< T > n) |
| template<typename T > | |
| static constexpr vec3_base< T > | normal (vec3_base< T > p0, vec3_base< T > p1, vec3_base< T > p2) |
| static void | mat_mul (std::span< float > dst, const float *src0, const float *src1, std::size_t n) |
| template<typename T > | |
| static vec3_base< T > | perspective_transform (const mat4_base< T > &m, vec3_base< T > v) |
| template<typename T > | |
| static constexpr vec3_base< T > | diag (const mat3_base< T > &m, std::size_t i) |
| template<typename T > | |
| static constexpr vec3_base< T > | inv_diag (const mat3_base< T > &m, std::size_t i) |
| template<typename T > | |
| static constexpr mat3_base< T > | minor_matrix (const mat4_base< T > &m, std::size_t i, std::size_t j) |
| template<typename T > | |
| static constexpr T | minor (const mat4_base< T > &m, std::size_t i, std::size_t j) |
| template<typename T > | |
| static constexpr T | determinant (const mat3_base< T > &m) |
| template<typename T > | |
| static constexpr T | determinant (const mat4_base< T > &m) |
| template<typename T > | |
| static constexpr T | cofactor (const mat4_base< T > &m, std::size_t i, std::size_t j) |
| template<typename T > | |
| static constexpr mat4_base< T > | adjugate (const mat4_base< T > &m) |
| template<typename T > | |
| static constexpr mat4_base< T > | inverse (const mat4_base< T > &m) |
| template<typename T > | |
| static constexpr mat3_base< T > | transpose (const mat3_base< T > &m) |
| template<typename T > | |
| static constexpr mat4_base< T > | transpose (const mat4_base< T > &m) |
| template<typename T > | |
| static constexpr mat4_base< T > | translate (const mat4_base< T > &m, vec3_base< T > v) |
| template<typename T > | |
| static constexpr mat4_base< T > | scale (const mat4_base< T > &m, vec3_base< T > v) |
| template<typename T > | |
| static constexpr vec2_base< T > | rotate (vec2_base< T > v, T sin, T cos) |
| template<typename T > | |
| static constexpr vec2_base< T > | rotate (vec2_base< T > v, T angle) |
| template<typename T > | |
| static constexpr vec3_base< T > | rotate (vec3_base< T > v, T sin, T cos, vec3_base< T > n) |
| template<typename T > | |
| static constexpr vec3_base< T > | rotate (vec3_base< T > v, T angle, vec3_base< T > n) |
| template<typename T > | |
| static constexpr vec3_base< T > | rotate_x (vec3_base< T > v, T sin, T cos) |
| template<typename T > | |
| static constexpr vec3_base< T > | rotate_y (vec3_base< T > v, T sin, T cos) |
| template<typename T > | |
| static constexpr vec3_base< T > | rotate_z (vec3_base< T > v, T sin, T cos) |
| template<typename T > | |
| static constexpr vec3_base< T > | rotate_x (vec3_base< T > v, T angle) |
| template<typename T > | |
| static constexpr vec3_base< T > | rotate_y (vec3_base< T > v, T angle) |
| template<typename T > | |
| static constexpr vec3_base< T > | rotate_z (vec3_base< T > v, T angle) |
| template<typename T > | |
| static constexpr mat4_base< T > | rotate (const mat4_base< T > &m, T angle, vec3_base< T > v) |
| template<typename T > | |
| static constexpr mat4_base< T > | ortho (T left, T right, T bottom, T top) |
| template<typename T > | |
| static constexpr mat4_base< T > | ortho (T left, T right, T bottom, T top, T near, T far) |
| template<typename T > | |
| static constexpr mat4_base< T > | perspective (T fovy, T aspect, T near, T far) |
| template<typename T > | |
| static constexpr mat4_base< T > | look_at (vec3_base< T > eye, vec3_base< T > center, vec3_base< T > up) |
| static void | gaussian_filter (std::size_t size, float std_dev, std::span< float > s) |
| static void | gaussian_filter (std::size_t xsize, std::size_t ysize, float std_dev, std::span< float > s) |
| static bool | is_aligned (void *p, std::size_t a) |
| static void * | align_ptr (void *p, std::size_t a) |
| template<typename T > | |
| static T * | align_ptr (void *p) |
Private Attributes | |
| std::optional< rnd_generator_t > | m_rnd_generator = {} |
Member Typedef Documentation
◆ rand_seed_t
| using nngn::Math::rand_seed_t = std::decay_t< > |
Member Function Documentation
◆ adjugate()
template<typename T >
|
inlinestaticconstexpr |
Here is the call graph for this function:

Here is the caller graph for this function:

◆ align_ptr() [1/2]
Here is the call graph for this function:

◆ align_ptr() [2/2]
|
inlinestatic |
Here is the call graph for this function:

Here is the caller graph for this function:
◆ angle() [1/2]
template<typename T >
|
inlinestaticconstexpr |
Here is the call graph for this function:

Here is the caller graph for this function:
◆ angle() [2/2]
template<typename T >
|
inlinestaticconstexpr |
Here is the call graph for this function:

◆ avg()
template<typename T >
|
inlinestaticconstexpr |
Here is the call graph for this function:

Here is the caller graph for this function:

◆ clamp_len()
Here is the call graph for this function:

Here is the caller graph for this function:

◆ cofactor()
template<typename T >
|
staticconstexpr |
◆ cross()
template<typename T >
|
inlinestaticconstexpr |
Here is the caller graph for this function:
◆ degrees()
Here is the call graph for this function:

◆ determinant() [1/2]
Here is the caller graph for this function:

◆ determinant() [2/2]
◆ diag()
template<typename T >
|
inlinestaticconstexpr |
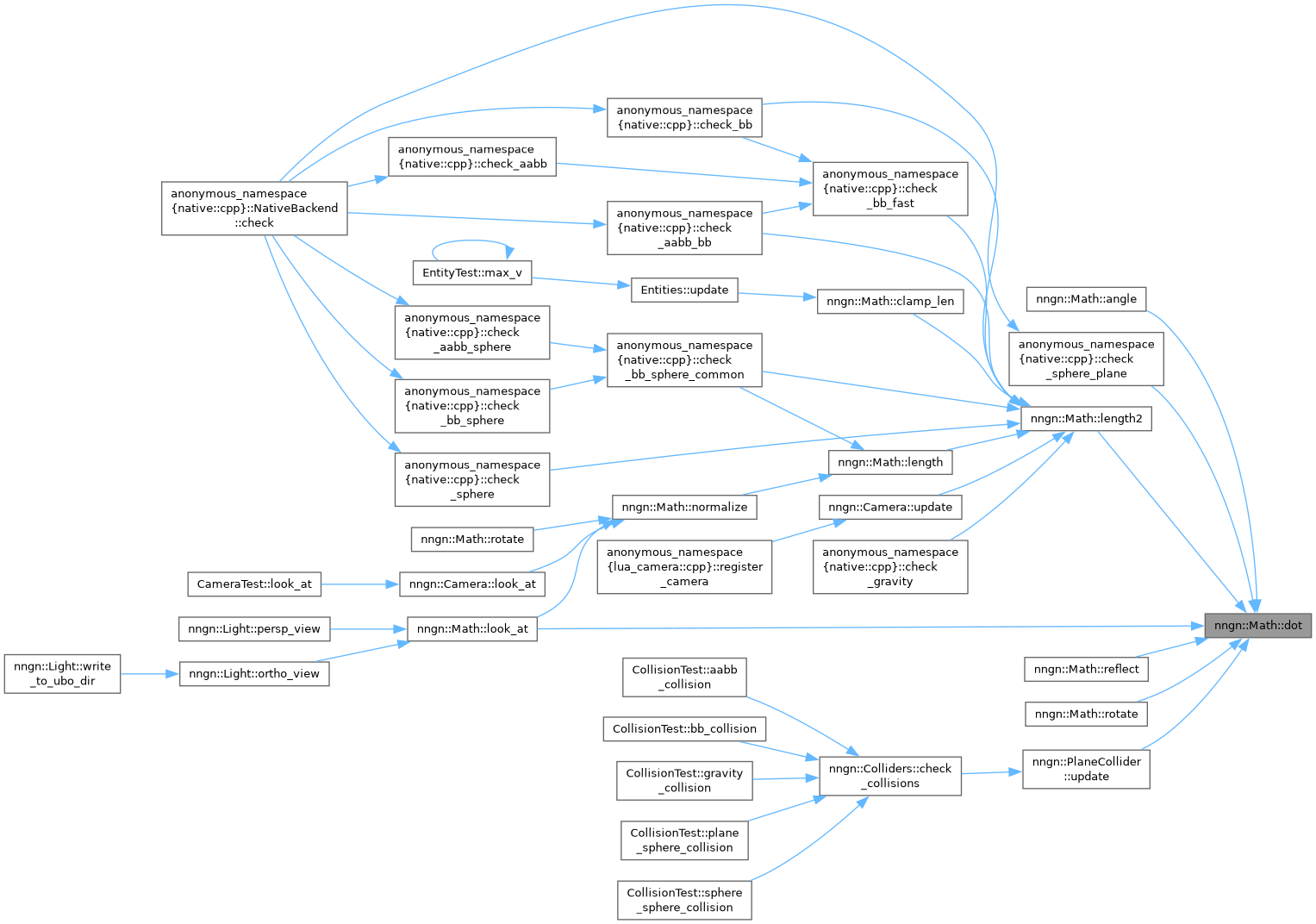
◆ dot()
Here is the caller graph for this function:
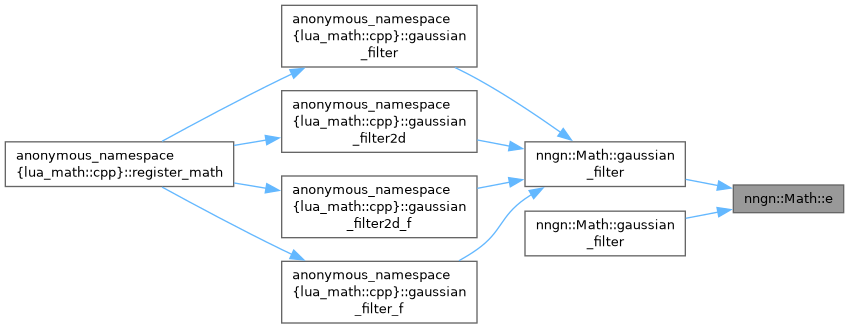
◆ e()
Here is the caller graph for this function:
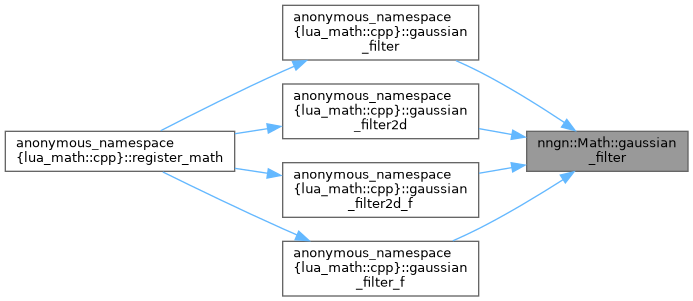
◆ gaussian_filter() [1/2]
Here is the call graph for this function:
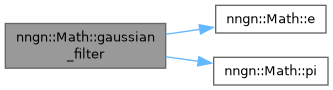
Here is the caller graph for this function:
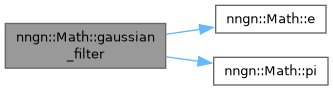
◆ gaussian_filter() [2/2]
|
static |
Here is the call graph for this function:
◆ init()
| void nngn::Math::init | ( | void | ) |
◆ inv_diag()
template<typename T >
|
inlinestaticconstexpr |
◆ inverse()
template<typename T >
|
inlinestaticconstexpr |
Here is the call graph for this function:

◆ is_aligned()
|
inlinestatic |
Here is the caller graph for this function:

◆ length()
Here is the call graph for this function:

Here is the caller graph for this function:

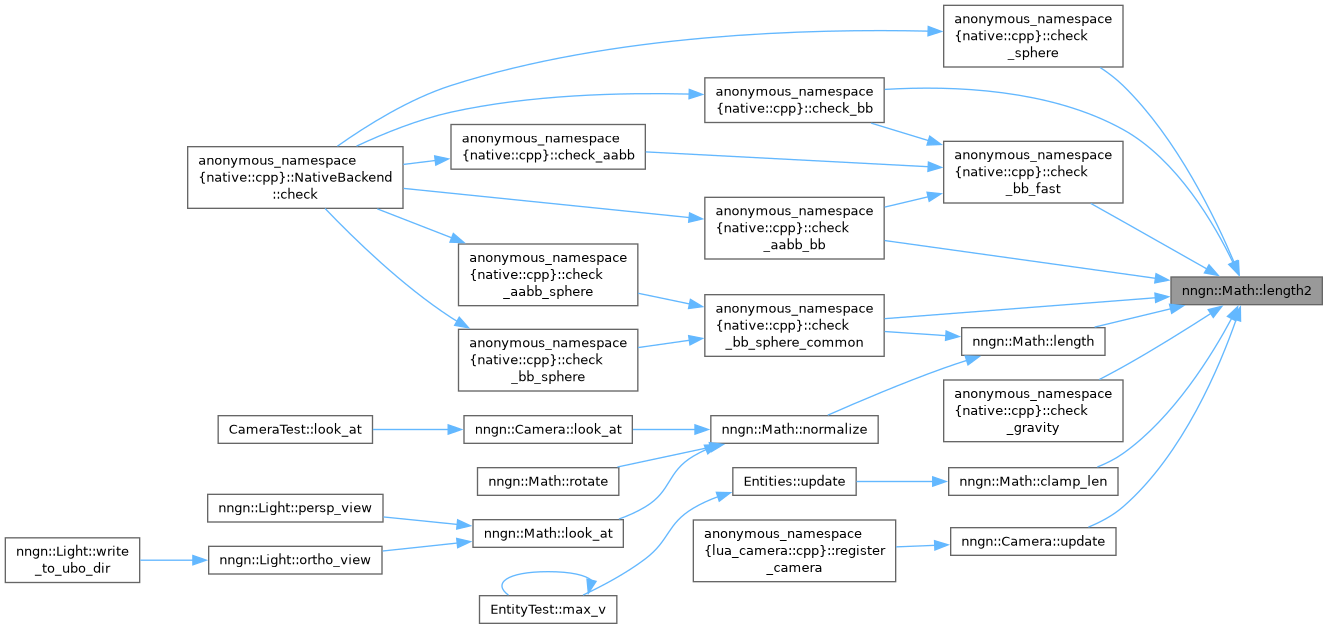
◆ length2()
Here is the call graph for this function:

Here is the caller graph for this function:
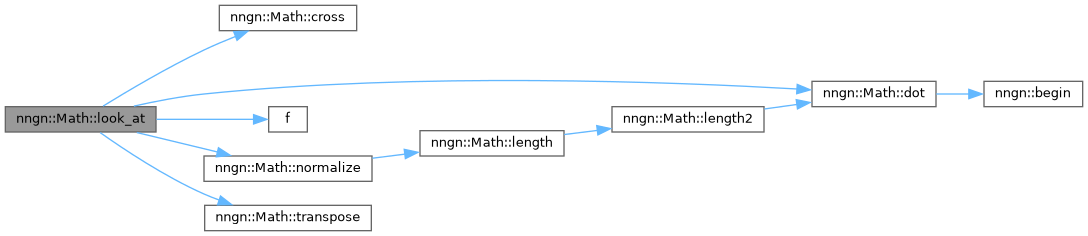
◆ look_at()
template<typename T >
|
inlinestaticconstexpr |
Here is the call graph for this function:
Here is the caller graph for this function:

◆ mat_mul()
|
static |
Here is the caller graph for this function:

◆ minor()
template<typename T >
|
inlinestaticconstexpr |
Here is the call graph for this function:
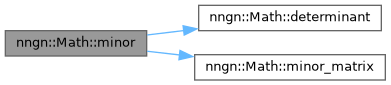
Here is the caller graph for this function:

◆ minor_matrix()
template<typename T >
|
inlinestaticconstexpr |
Here is the caller graph for this function:

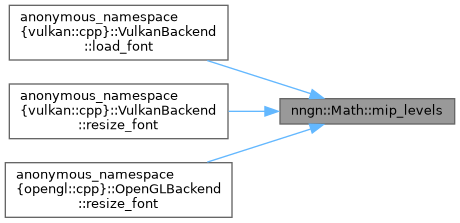
◆ mip_levels()
Here is the caller graph for this function:
◆ normal()
template<typename T >
|
inlinestaticconstexpr |
Here is the call graph for this function:

◆ normalize()
Here is the call graph for this function:

Here is the caller graph for this function:

◆ ortho() [1/2]
template<typename T >
|
inlinestaticconstexpr |
Here is the caller graph for this function:

◆ ortho() [2/2]
template<typename T >
|
inlinestaticconstexpr |
Here is the call graph for this function:

◆ perspective()
template<typename T >
|
inlinestaticconstexpr |
Here is the caller graph for this function:

◆ perspective_transform()
template<typename T >
|
inlinestatic |
Here is the call graph for this function:

Here is the caller graph for this function:
◆ pi()
Here is the caller graph for this function:
◆ product()
template<typename T >
|
inlinestaticconstexpr |
Here is the call graph for this function:

Here is the caller graph for this function:
◆ radians()
Here is the call graph for this function:

Here is the caller graph for this function:
◆ rand_mat()
| void nngn::Math::rand_mat | ( | std::span< float > | m | ) |
Here is the call graph for this function:
◆ reflect()
template<typename T >
|
inlinestaticconstexpr |
Here is the call graph for this function:

◆ rnd_generator()
|
inline |
Here is the caller graph for this function:
◆ rotate() [1/5]
template<typename T >
|
inlinestaticconstexpr |
Here is the call graph for this function:

◆ rotate() [2/5]
template<typename T >
|
inlinestaticconstexpr |
Here is the call graph for this function:
◆ rotate() [3/5]
template<typename T >
|
inlinestaticconstexpr |
Here is the caller graph for this function:
◆ rotate() [4/5]
template<typename T >
|
inlinestaticconstexpr |
Here is the call graph for this function:
◆ rotate() [5/5]
template<typename T >
|
inlinestaticconstexpr |
Here is the call graph for this function:

◆ rotate_x() [1/2]
template<typename T >
|
inlinestaticconstexpr |
Here is the call graph for this function:

◆ rotate_x() [2/2]
template<typename T >
|
inlinestaticconstexpr |
Here is the call graph for this function:

Here is the caller graph for this function:
◆ rotate_y() [1/2]
template<typename T >
|
inlinestaticconstexpr |
Here is the call graph for this function:

◆ rotate_y() [2/2]
template<typename T >
|
inlinestaticconstexpr |
Here is the call graph for this function:

Here is the caller graph for this function:
◆ rotate_z() [1/2]
template<typename T >
|
inlinestaticconstexpr |
Here is the call graph for this function:

◆ rotate_z() [2/2]
template<typename T >
|
inlinestaticconstexpr |
Here is the call graph for this function:

Here is the caller graph for this function:
◆ round_down()
◆ round_down_pow2()
◆ round_up()
Here is the caller graph for this function:

◆ round_up_div()
Here is the caller graph for this function:
◆ round_up_pow2()
Here is the caller graph for this function:

◆ scale()
template<typename T >
|
inlinestaticconstexpr |
◆ seed_rand()
| void nngn::Math::seed_rand | ( | rand_seed_t | s | ) |
Here is the call graph for this function:

◆ sq2()
◆ sq2_2()
Here is the caller graph for this function:

◆ sum()
template<typename T >
|
inlinestaticconstexpr |
Here is the call graph for this function:

Here is the caller graph for this function:

◆ tau()
Here is the caller graph for this function:
◆ translate()
template<typename T >
|
inlinestaticconstexpr |
◆ transpose() [1/2]
template<typename T >
|
inlinestaticconstexpr |
Here is the call graph for this function:

Here is the caller graph for this function:
◆ transpose() [2/2]
template<typename T >
|
inlinestaticconstexpr |
Here is the call graph for this function:

Member Data Documentation
◆ m_rnd_generator
|
private |
The documentation for this class was generated from the following files: