Loading...
Searching...
No Matches
vec4.h File Reference
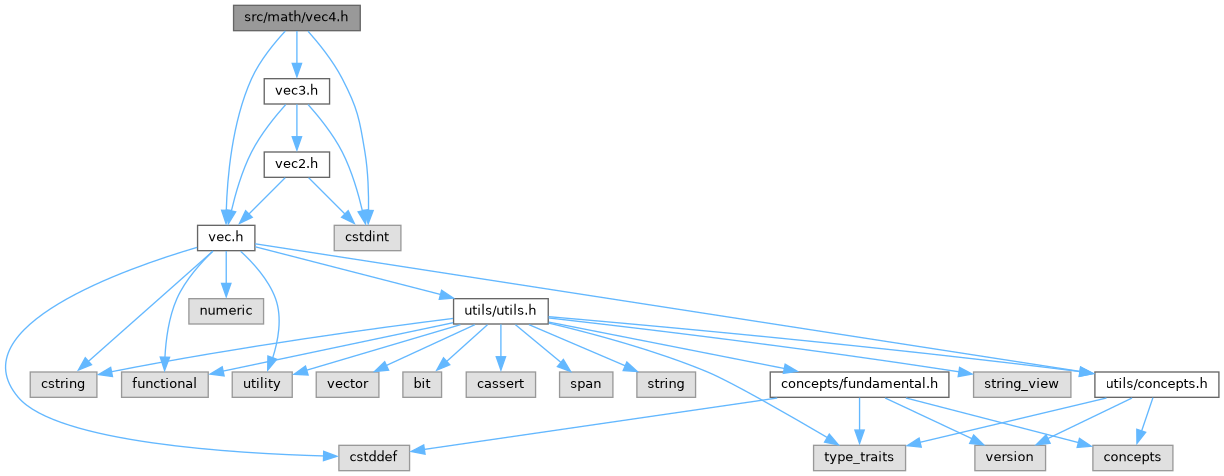
Include dependency graph for vec4.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| struct | nngn::vec4_base< T > |
| struct | nngn::vec_type< T, 4 > |
Namespaces | |
| namespace | nngn |
Macros | |
| #define | S(v0, v1) constexpr vec2_base<T> v0 ## v1() const { return {this->v0, this->v1}; } |
| #define | S(v0, v1, v2) |
| #define | S(v0, v1, v2, v3) |
Typedefs | |
| using | nngn::ivec4 = vec4_base<std::int32_t> |
| using | nngn::uvec4 = vec4_base<std::uint32_t> |
| using | nngn::zvec4 = vec4_base<std::size_t> |
| using | nngn::vec4 = vec4_base<float> |
| using | nngn::dvec4 = vec4_base<double> |
Macro Definition Documentation
◆ S [1/3]
◆ S [2/3]
| #define S | ( | v0, | |
| v1, | |||
| v2 ) |
◆ S [3/3]
| #define S | ( | v0, | |
| v1, | |||
| v2, | |||
| v3 ) |
Value:
constexpr vec4_base<T> v0 ## v1 ## v2 ## v3() const \
{ return {this->v0, this->v1, this->v2, this->v3}; }